Photo Gallery

Designed & Built by Justin Port — Texas Tech University Mechanical Engineer
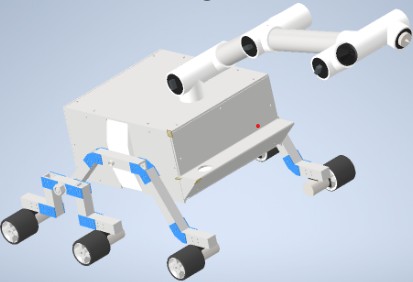
The purpose of the NASA RC Rover project is to design a robotic vehicle capable of completing all challenges listed in NASA’s guidebook. These challenges include navigating rough terrain and performing precision tasks, such as drilling and vacuuming samples, with no contamination. This design attempts to meet all of NASA’s challenges and successfully perform through testing. Since this is the first time a team from Texas Tech is participating in this challenge, this design will become a framework for other teams to build off in the future. :contentReference[oaicite:0]{index=0}
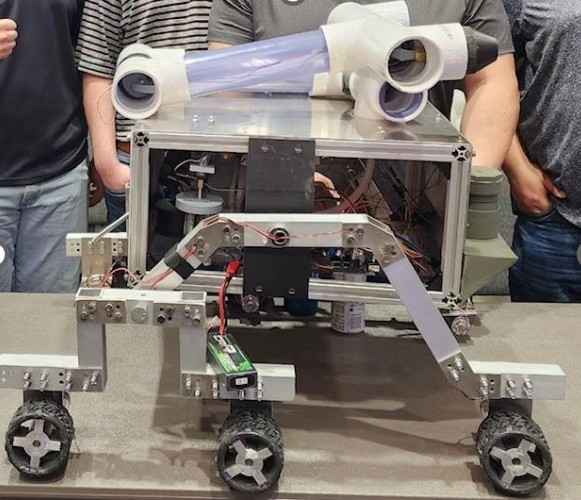
Notable components of our design include a rocker-bogie suspension system—modeled after Curiosity & Perseverance—for stability over rough terrain; a lightweight aluminum frame; and 3D-printed components to reduce cost without sacrificing strength. Testing led us to switch to 14 gage wiring for the drive motors and upgrade the vacuum’s power source. We also recommend ≥ 1″ bearings in the arm joints for full operational reliability. Overall, the suspension and controls meet NASA standards, and this rover is a solid first step for future Texas Tech teams. :contentReference[oaicite:1]{index=1}
Ensures five-point contact and self-leveling over uneven ground, enabling stable traversal of rocky & sandy terrain.
Constructed from extruded and bent aluminum for high strength-to-weight ratio and excellent heat dissipation.
Custom brackets, arm housings, and nozzles produced in polymer to reduce cost and speed up iteration.
Four-joint PVC arm with vacuum nozzle and drill bit—mounted on bearings for smooth, contamination-free sample collection.
| Specification | Details |
|---|---|
| Dimensions | Fits within 2.5 ft³ constraint |
| Weight | ~20 lbs total |
| Drive Motors | 14 gage wiring to six 12 V DC motors |
| Power Source | 11.4 V LiPo + 7.2 V backup; vacuum on dedicated 12 V supply |
| Control | Arduino UNO + L298N motor drivers + Bluetooth remote |
| Max Speed | ~3 mph (field-tested) |
| Terrain | Rock, sand, inclines up to 45° |
Questions or collaborations? Justinport.me@gmail.com