Photo Gallery
Ultrasonic Distance Mapping with Real-Time Visualization
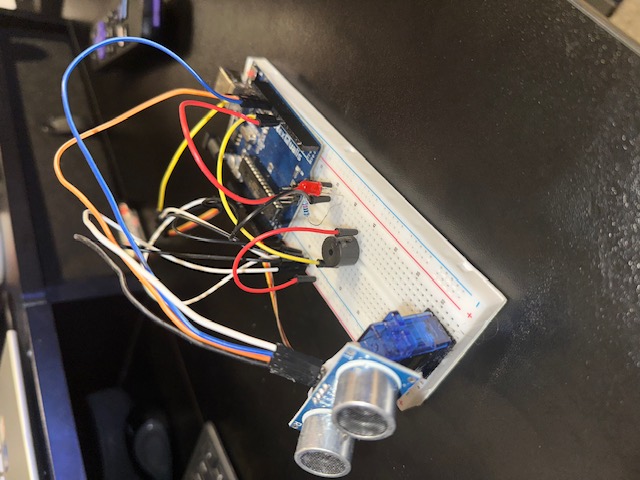
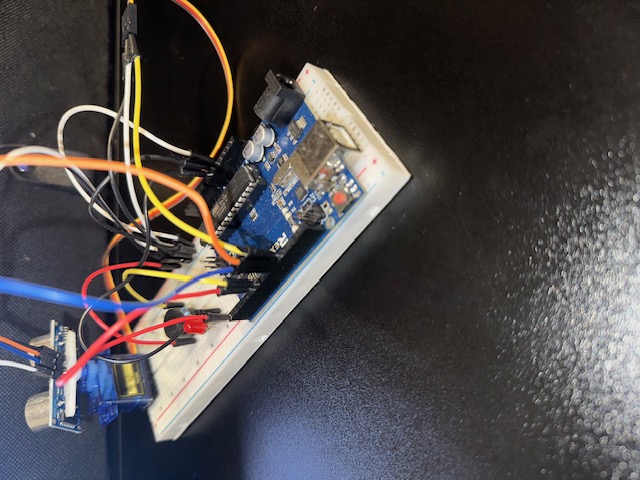
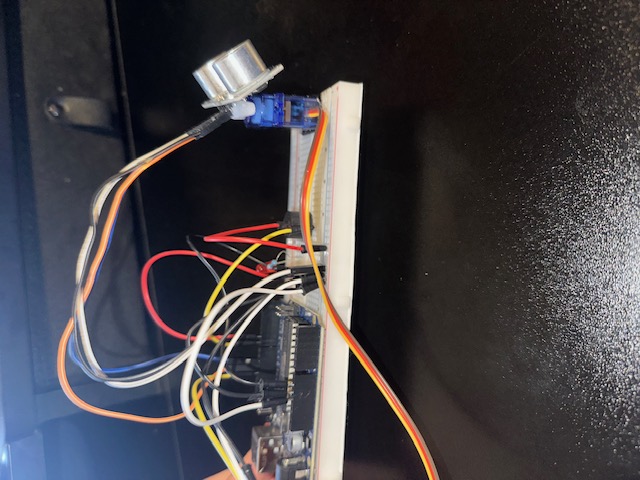
This project simulates a simple radar system using an Arduino, an ultrasonic sensor, a servo motor, an active buzzer, and an LED. I chose this to complement my NASA RC Rover design—adding obstacle detection for planetary exploration scenarios where visibility and control are limited.
| Sensor | Part # | Function | Signal | Label |
|---|---|---|---|---|
| Ultrasonic HC-SR04 | HC-SR04 | Measures distance via ultrasonic pulses | Time-based pulse | Sonar |
| Device | Function | Signal | Label |
|---|---|---|---|
| Servo Motor | Rotates sensor through scan arc | PWM | Scanner |
| Active Buzzer | Audible alert when object < 20 cm | Digital (LOW = ON) | AlertTone |
| Red LED | Visual alert when object < 20 cm | Digital (HIGH = ON) | AlertLight |
LED current-limiting resistor: 220 Ω (~20 mA).
Sampling interval: ~30 ms per step (delay(30) in code).
No external capacitors used.
// Includes the Servo library
#include
// Defines Trig and Echo pins of the Ultrasonic Sensor
const int trigPin = 10;
const int echoPin = 11;
const int buzzerPin = 7; // Active buzzer (LOW = on)
const int ledPin = 6; // Red LED (HIGH = on)
long duration;
int distance;
Servo myServo;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzerPin, OUTPUT);
pinMode(ledPin, OUTPUT);
digitalWrite(buzzerPin, HIGH); // OFF
digitalWrite(ledPin, LOW); // OFF
Serial.begin(9600);
myServo.attach(12);
}
void loop() {
// Sweep out
for (int i = 15; i <= 165; i++) {
myServo.write(i);
delay(30);
distance = calculateDistance();
if (distance > 0 && distance < 20) {
digitalWrite(buzzerPin, LOW);
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(buzzerPin, HIGH);
digitalWrite(ledPin, LOW);
}
Serial.print(i); Serial.print(",");
Serial.print(distance); Serial.print(".");
}
// Sweep back
for (int i = 165; i > 15; i--) {
myServo.write(i);
delay(30);
distance = calculateDistance();
if (distance > 0 && distance < 20) {
digitalWrite(buzzerPin, LOW);
digitalWrite(ledPin, HIGH);
} else {
digitalWrite(buzzerPin, HIGH);
digitalWrite(ledPin, LOW);
}
Serial.print(i); Serial.print(",");
Serial.print(distance); Serial.print(".");
}
}
// Return distance in cm
int calculateDistance() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
return duration * 0.034 / 2;
}
import processing.serial.*; // serial library
import java.awt.event.KeyEvent; // for keyboard events
import java.io.IOException;
Serial myPort; // serial object
String angle = "", distance = "", data = "", noObject;
float pixsDistance;
int iAngle, iDistance;
void setup() {
size(1200, 700); // match your screen
smooth();
myPort = new Serial(this, "COM3", 9600);
myPort.bufferUntil('.');
}
void draw() {
// fade effect
noStroke();
fill(0,4);
rect(0, 0, width, height - height*0.065);
// draw radar
stroke(98,245,31);
strokeWeight(2);
noFill();
pushMatrix();
translate(width/2, height - height*0.074);
arc(0,0, width - width*0.0625, width - width*0.0625, PI, TWO_PI);
arc(0,0, width - width*0.27, width - width*0.27, PI, TWO_PI);
arc(0,0, width - width*0.479, width - width*0.479, PI, TWO_PI);
arc(0,0, width - width*0.687, width - width*0.687, PI, TWO_PI);
line(-width/2,0, width/2,0);
popMatrix();
// draw scan line
stroke(30,250,60);
strokeWeight(9);
pushMatrix();
translate(width/2, height - height*0.074);
line(0,0,
(height - height*0.12)*cos(radians(iAngle)),
-(height - height*0.12)*sin(radians(iAngle))
);
popMatrix();
// draw object blip
stroke(255,10,10);
strokeWeight(9);
pixsDistance = iDistance * ((height - height*0.1666) * 0.025);
if (iDistance < 40) {
pushMatrix();
translate(width/2, height - height*0.074);
line(
pixsDistance*cos(radians(iAngle)),
-pixsDistance*sin(radians(iAngle)),
(width - width*0.505)*cos(radians(iAngle)),
-(width - width*0.505)*sin(radians(iAngle))
);
popMatrix();
}
// draw text overlay
fill(0);
noStroke();
rect(0, height - height*0.065, width, height);
fill(98,245,31);
textSize(40);
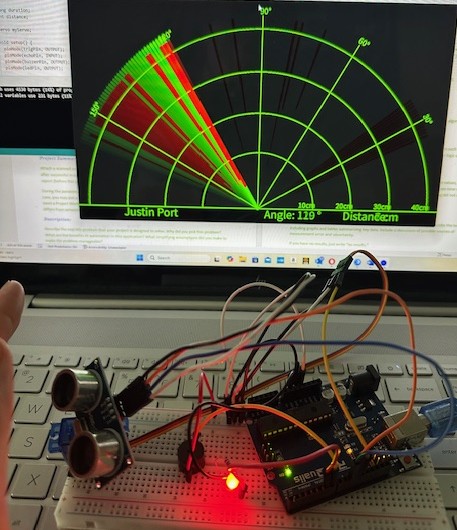
text("Justin Port", 50, height - 20);
textSize(25);
text("Angle: " + iAngle + "°", 400, height - 20);
text("Distance: " + iDistance + " cm", 700, height - 20);
}
void serialEvent(Serial p) {
data = p.readStringUntil('.');
data = data.substring(0, data.length() -1);
int comma = data.indexOf(',');
angle = data.substring(0, comma);
distance = data.substring(comma+1);
iAngle = int(angle);
iDistance = int(distance);
}